在汽车电子软件开发中,统一诊断服务(UDS)是实现车辆诊断、刷写和监控的核心协议。Communication Control服务(服务标识符0x28)是UDS协议中一个关键的功能控制服务,它允许诊断仪动态地管理车载网络中各ECU的通信行为。本文将结合AUTOSAR基础软件(BSW)的实践,深入详解0x28服务的功能、配置及与底层通信栈的集成。
1. Communication Control服务(0x28)概述
Communication Control服务的主要目的是控制ECU内部非诊断通信的发送与接收。例如,在ECU刷写(编程会话)期间,为了确保诊断通信的带宽和稳定性,通常需要暂时禁止应用报文(如CAN信号)的发送。该服务允许诊断仪在特定诊断会话(如扩展会话)下,对ECU的通信通道(如CAN、LIN、FlexRay等网络)进行启停控制。
2. 服务请求与响应格式
- 请求格式:28 + SubFunction + ControlType + [CommunicationType]
- SubFunction(子功能):高字节位表示抑制肯定响应位(SuppressPosRspMsgIndicationBit),低7位定义控制模式(如0x00=使能Rx和Tx,0x01=使能Rx但禁用Tx,0x02=禁用Rx但使能Tx,0x03=禁用Rx和Tx)。
- ControlType(控制类型):指定控制是应用于所有通信(0x00)还是特定网络(如0x01=CAN, 0x02=CAN FD, 0x03=以太网等)。
- CommunicationType(通信类型,可选):当ControlType指定特定网络时,此参数进一步细化控制对象(如具体的通道ID或报文ID)。
- 肯定响应格式:68 + SubFunction(回显请求中的子功能)
- 否定响应码(NRC):常见的有0x12(子功能不支持)、0x13(报文长度或格式错误)、0x22(条件不满足,如不在扩展会话中)、0x31(请求超出范围,如不支持的通道)。
3. AUTOSAR基础软件中的配置详解
在AUTOSAR方法论中,0x28服务的实现和配置主要涉及诊断通信管理器(Dcm)、通信管理器(ComM)以及底层通信驱动(如CanIf、EthIf)。
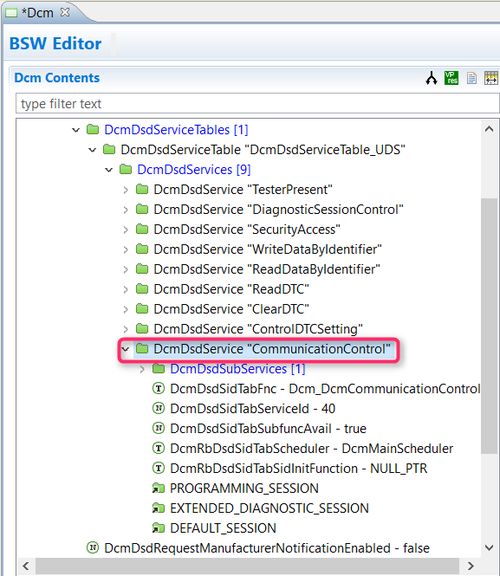
3.1 Dcm模块配置(Dcm模块)
在Dcm配置中,需要为0x28服务定义服务表(DcmDspService)。关键配置项包括:
- 服务标识符:0x28。
- 会话与安全访问控制:通常,Communication Control服务仅在非默认会话(如扩展会话或编程会话)下可用,并且可能需要特定的安全访问等级。这需要在DcmDspSessionControl中关联。
- 子功能支持:定义ECU支持的子功能列表(如0x00, 0x01, 0x02, 0x03)。
- 数据参数处理:配置对ControlType和可选CommunicationType参数的处理逻辑,包括数据长度和有效性检查。
3.2 ComM模块集成与配置
ComM是AUTOSAR中管理网络通信模式的中心模块。0x28服务的核心逻辑往往通过调用ComM的API来实现。
- 通信模式管理:当收到有效的0x28请求时,Dcm模块应调用
ComM<em>RequestComMode或ComM</em>InhibitCommunication等API,通知ComM改变指定通道的通信模式(FULLCOMMUNICATION, SILENTCOMMUNICATION, NO_COMMUNICATION)。 - 通道映射配置:在ComM配置中,需明确定义网络通道标识符(如ComMChannelId)与物理通信通道(如Can控制器通道)的映射关系。这确保了0x28请求中的ControlType能正确映射到目标网络。
3.3 通信接口层配置(CanIf, EthIf等)
ComM的模式控制最终会传递到通信接口层。
- 通信控制API:CanIf、EthIf等模块提供了
CanIf<em>Control、EthIf</em>Control等函数,用于执行具体的通信启停操作(如禁止报文发送/接收)。 - 配置关联:需要确保ComM的通道配置与通信接口层的通道配置一致,使得控制指令能正确下达。
4. 实战配置流程与示例
- 定义需求:明确ECU需要支持哪些子功能(例如,刷写时只需禁用Tx),以及控制哪些网络通道(如CAN Channel 0)。
- BSW模块配置:
- 在Dcm配置中,启用0x28服务,绑定到扩展会话,配置支持的子功能为0x01(禁用Tx)。
- 在ComM配置中,创建一个ComMChannel(例如ID=0),并将其与
CanIf/Can的ControllerRef关联。
- 配置Dcm与ComM的交互:在Dcm代码中,实现0x28服务的回调函数,当收到子功能0x01请求时,调用
ComM<em>InhibitCommunication(0, COMM</em>INHIBIT)。
- 通信栈联动:配置ComM,使其在进入SILENTCOMMUNICATION模式时,通过CanIf的
CanIf</em>ControlAPI,将对应CAN控制器的发送功能禁用。
5. 注意事项与最佳实践
- 会话依赖:务必正确配置会话保护,避免在默认会话下误操作影响车辆正常通信。
- 状态恢复:当诊断会话退出(如退回默认会话)时,应确保通信状态自动恢复。这通常通过ComM的自动状态机管理或Dcm的会话层回调函数实现。
- 网络管理协同:如果ECU支持AUTOSAR网络管理(NM),需注意Communication Control服务与NM模式的协同,防止冲突。通常,ComM会协调NM和诊断的通信需求。
- 安全性考虑:在可能影响车辆安全功能的通道上执行禁用操作时,应增加额外的安全访问或预条件检查。
###
Communication Control服务(0x28)是连接UDS诊断层与AUTOSAR通信栈的关键枢纽。通过精准的Dcm、ComM及通信接口层配置,可以实现对ECU通信行为的灵活、安全控制,为诊断、编程和测试等场景提供坚实基础。理解各BSW模块间的交互关系,是成功集成此服务的关键。